Controller automatico di misurazione della visione generale a 4 assi pacchetto intelligente
Introduzione
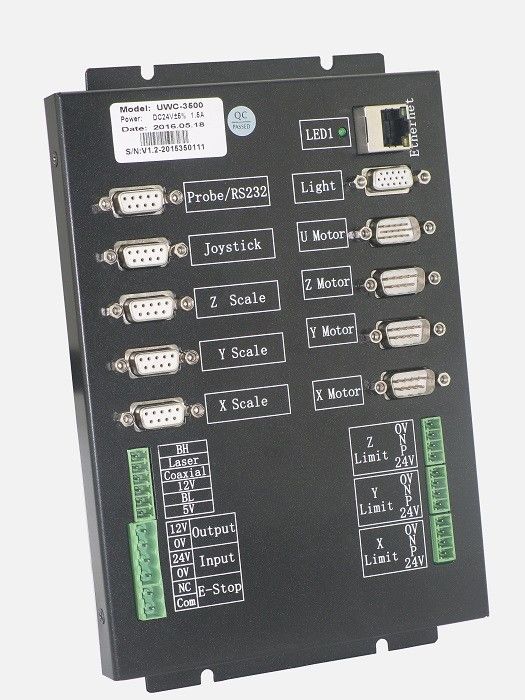
UWC 3500 è un generico controller a circuito chiuso a 4 assi, utilizzato nelle macchine di misurazione della visione e nelle macchine di misurazione della visione composita o nei sistemi di misurazione automatizzati.con retroalimentazione della posizione in circuito chiuso della scala lineare o dell'encoder motore, l'UWC3500 è in grado di raggiungere un'elevata precisione.
Caratteristiche:
1Struttura avanzata della macchina superiore e inferiore, CPU+FPGA ad alte prestazioni
2. Comunicazione: interfaccia Ethernet, il tempo di esecuzione per una singola funzione API è inferiore a 0,45 ms.
3. Modalità di controllo direzione+impulso, in grado di controllare motori a gradini, servo CA, servo lineare o DDM, ecc.
4. controllo completo del movimento a circuito chiuso, localizzazione ad alta precisione che è veloce, accurata e stabile. algoritmo avanzato di controllo a circuito chiuso e pochissimi parametri PID, assicurano una facile svolta per gli utenti.
5. S tipo curva di velocità pianificazione, il rapporto di sezione S nel processo di decelerazione può essere impostato.
6Strategia di localizzazione:
Impulso + controllo a circuito aperto.
Controllo a ciclo chiuso di feedback della posizione della scala lineare/codificatore, algoritmo migliorato PID+VFF, eliminando il problema dello spostamento zero.
7- Modalità di movimento:
Punto a punto, modalità JOG, modalità di guida che è facile da usare e flessibile, interpolazione lineare a 2 assi o 3 assi, interpolazione ad arco orizzontale, sonda tattile e modalità joystick.
8- Politica di sicurezza:
Funzione di regolazione automatica della rotazione della macchina, impostazione automatica della logica e della direzione limite, dei parametri dei motori e della direzione di feedback lineare,assicurarsi di eliminare l'errore di movimento di feedback.
Quando l'asse si muove vicino al limite, si verifica una decelerazione in anticipo e, prima di orientarsi, si verifica una restrizione forzata della velocità di movimento.
Supporto di software limitato.
9. La funzione API utilizza l'incapsulamento rivolto all'oggetto, che offre una programmazione facile. La maggior parte dei parametri sono impostati dal software di debug.
10Alta integrazione, elevate prestazioni, produzione e manutenzione stabili e facili.
11L'UWC-3500 utilizza la tecnologia di produzione SMT, garantendo stabilità e affidabilità.
12. Con un'elevata flessibilità l'UWC3500 si adatta alle attrezzature non standard ed è disponibile anche una funzione personalizzata.
13. L'UWC3500 supporta la funzione di aggiornamento del firmware online, gli utenti non devono rimuovere il controller dalla macchina, è facile aggiornare ed espandere la funzione,abbreviare il ciclo di sviluppo e di tornitura dell'apparecchiatura.
14Modulo IO esterno UWC348, massimo per 26 in 26 fuori.
15. funzione di abbinamento di confronto di posizione, che può essere abbinato con precisione, anche gli utenti possono impostare la gamma di abbinamento del trigger, l'uscita di innesco può essere collegata alla fotocamera o al sensore laser.
16Funzione di controllo della sorgente luminosa stroboflash operativa e funzione di accoppiamento della posizione del CCD.
17. software di debug potente incluso, facile funzionamento, facile per gli utenti di girare la macchina.
Parametri
| Articolo |
Un minuto.
|
Tipico
|
- Max, ti prego.
|
Unità
|
| Tempo di funzionamento dell'API |
0.425
|
0.43
|
0.45
|
ms
|
| Tensione di potenza di ingresso |
22.5
|
24
|
26
|
VDC
|
| tensione di uscita di potenza ausiliaria di 12 V |
11.76
|
12.05
|
12.24
|
VDC
|
| corrente di uscita di potenza ausiliaria di 12 V |
0
|
2.0
|
2.5
|
A
|
| tensione di uscita di potenza di 5 V |
5.1
|
5.2
|
5.25
|
VDC
|
| Corrente di uscita di potenza 5V |
0
|
1.8
|
2.0
|
A
|
| Interfaccia motore X/Y/Z capacità di carico 24V |
0
|
3.0
|
4.0
|
A
|
| Frequenza di impulso di direzione |
-
|
-
|
6.5
|
MHz
|
| Risoluzione della frequenza |
0.006
|
-
|
-
|
Hz
|
| Intervallo di conteggio a scala lineare |
- 2147483648
|
-
|
2147483647
|
CNT
|
| Intervallo di conteggio dell'impulso di direzione |
- 2147483648
|
-
|
2147483647
|
CNT
|
| Livello di regolazione della velocità |
-
|
-
|
1,000,000,000
|
DDS a 32 bit
|
| Risoluzione a scala lineare supportata |
- Zero.01
|
-
|
10000
|
- Sì.
|
| Frequenza di uscita del segnale a scala lineare |
-
|
-
|
6.5
|
MHz
|
| Input/output generale del regolatore |
-
|
-
|
-
|
Terminal
|
| Interfaccia di comunicazione RS232 ad alta velocità |
-
|
2
|
-
|
Terminal
|
| Input/output esterno (utilizzando un'interfaccia di comunicazione RS232) |
-
|
24 ore su 24
|
-
|
Terminal
|
| Corrente di uscita a passaggio |
0.07
|
-
|
1.15
|
A (RMS)
|
| Sottodivisione di azionamento a passo |
16
|
16
|
16
|
|
Specificità
| - No, no, no. |
Specificità
|
UWC3500
|
| 1 |
Fornitura di potenza
|
Input DC24V@2A,uscita DC12V@2A ((alimentazione CCD)
|
| 2 |
Misurazione della compatibilità del software
|
Compatibile con V1.4
|
| 3 |
Dimensione
|
255 * 118 * 53 mm
|
| 4 |
Comunicazione
|
USB o Ethernet isolato (facoltativo)
|
| 5 |
politica di controllo a circuito chiuso
|
PID+VFF+ banda morta
|
| 6 |
Frequenza di aggiornamento servo
|
2.5KHz
|
| 7 |
Sconvolgimento anti-meccanico, ottimizzazione della velocità
|
Modalità SMART
|
|
| 8 |
Asse di conteggio del trasduttore lineare
|
3
|
|
| 9 |
Asse di comando di base
|
4
|
|
| 10 |
Spese dell'asse
|
Possibilità di aggiungere 3 assi di impulso+direzione
|
|
| 11 |
Modalità di controllo dell'asse XYZ
|
Impulso + direzione RS422
|
|
| 12 |
Tipo di motori a asse XYZ (con motore esterno)
|
Servo passo/AC/servo lineare/servo CC con feedback dell'encoder
|
|
| 13 |
Modalità di comando dell'asse U A
|
RS232 connessione all'obiettivo Pomeas auto zoom
|
|
| 14 |
Modalità di comando dell'asse U B
|
È incorporato un driver step a 2 fasi, che supporta l'obiettivo zoom automatico con motori step, sono supportati limiti singoli / duo.
|
|
| 15 |
Pianificazione della curva di velocità
|
Tipo di scala/S
|
|
| 16 |
Interpolazione
|
Interpolazione lineare a più assi, interpolazione ad arco a 2 assi, interpolazione a 3 assi
|
| 17 |
Frequenza massima del pulso
|
5 MHz
|
|
| 18 |
Risoluzione della frequenza d'impulso
|
0.001Hz
|
|
| 19 |
Livello di regolazione della velocità
|
1,000,000,000
|
|
| 20 |
Controllo della tensione analogica
|
-
|
|
| 21 |
Frequenza di conteggio del trasduttore lineare
|
6MHz/(Fase A o B)
|
|
| 22 |
Definizione del segnale del trasduttore lineare
|
R o S per facoltativo (R:12345, S:26789)
|
|
| 23 |
Hardware di misurazione della sonda
|
Circuito di interfaccia della sonda a contatto
|
|
| 24 |
Circuito di elaborazione degli errori della sonda
|
Disponibile, riparazione automatica della sonda nonhoming
|
|
| 25 |
Sonde compatibile
|
Sonde di contatto a scatto per tutte le serie Renishaw/Tesa
|
|
| 26 |
Modulo di elaborazione della sonda
|
Bloccaggio ad alta velocità della sonda, controllo joystick punto tocco pausa automatica e ritiro automatico, modalità punto di rilevamento automatico
|
|
| 27 |
Carta di raccolta del segnale del joystick incorporata
|
Risoluzione a 12 bit, ingresso di tensione analogica da 0 a 5 V, 3 pulsanti e 3 LED, interruttore di arresto di emergenza incluso, manopola di regolazione della velocità inclusa (utilizzata in esclusiva con il pulsante 3 #)
|
|
| 28 |
Carta di controllo dell'illuminazione incorporata
|
8 luce di superficie di sezione + luce di fondo + luce coassiale, regolazione software del livello 0-200
|
|
| 29 |
Funzione di impostazione del grado di illuminazione
|
16 livelli di regolazione hardware nella base di impostazione dei parametri sulla luminosità richiesta
|
|
| 30 |
capacità di controllo della luce di contorno / controllo della banchina a LED
|
Max. 420mA, adatto per la maggior parte delle grandi macchine da viaggio
|
|
| 31 |
Interfaccia di illuminazione esterna di tipo complesso
|
Capace di connettersi a 5 anelli 8 sezione luce programmabile a colori singoli, o 5 anelli 8 sezione 4 luce programmabile a colori, luce elevata / rotabile
|
|
| 32 |
Interfaccia I/O generale
|
8 sezioni di ingresso isolato, 5 di uscita (compatibile con ULN2803)
|
|
| 33 |
Orologio di sistema
|
Anno-mese-giorno-ora-minuto-secondo, non modificabile
|
|
| 34 |
Aggiornamento del firmware
|
Aggiornamento del cliente in loco, offrendo una soluzione rapida e un aggiornamento tecnico.
|
|
| 35 |
Collegamento della sonda
|
connettore D-DUB a 9 pin, più facile da cablare e più stabile
|
|
| 36 |
connettore joystick
|
OTP6, OTP7, HC3 ((Joystick multi tasti)
|
|
| 37 |
Trattamento dei dati del joystick
|
Il controller elabora internamente i dati del joystick e il controllo del movimento, reciproco con l'altra modalità di controllo del movimento, la sonda del joystick tocca con l'arresto automatico e il ritiro automatico
|
|
| 38 |
Fermo di emergenza esterno
|
Il pulsante di arresto di emergenza controlla l'alimentazione del motore
|
|
| 39 |
Pianificazione della curva di velocità
|
Scala / tipo S
|
|
| 40 |
Interruttore di limite software
|
Disponibile
|
|
| 41 |
Punto di decelerazione del software
|
Disponibile
|
|
| 42 |
Distanza di frenata prescritta
|
Disponibile
|
|
| 43 |
Software di debug supportato
|
Versione V4.0 o superiore (parametro di rilevamento e impostazione automatici)
|
|

 Il tuo messaggio deve contenere da 20 a 3000 caratteri!
Il tuo messaggio deve contenere da 20 a 3000 caratteri!